Сопромат.in.ua: Внешние и внутренние силы. Механическая система
В результате действия внешних сил в теле возникают внутренние силы
.
Внутренняя сила
- силы взаимодействия между частями одного тела, возникающие под действием внешних сил.
Внутренние силы являются самоуравновешенными, поэтому они не видны и не влияют на равновесие тела. Определяют внутренние силы методом сечения.
Внешние нагрузки приводят к следующим видам напряженно-деформированного состояния:
· Кручение
Для расчетов элементов конструкции на прочность необходимо знать внутренние силы упругости, возникающие в результате приложения внешних сил в разных точках и частях конструкции.
Способы определения этих внутренних сил с помощью науки сопротивление материалов включают такой прием, как метод сечений.
Метод сечений заключается в том, что тело мысленно рассекается плоскостью на две части, любая из которых отбрасывается и взамен ее к сечению оставшейся части прикладываются внутренние силы, действовавшие на нее до разреза со стороны отброшенной части. Оставленная часть рассматривается как самостоятельное тело, находящееся в равновесии под действием приложенных к сечению внешних и внутренних сил (третий закон Ньютона – действие равно противодействию).
При применении этого метода выгоднее отбрасывать ту часть элемента конструкции (тела), для которой проще составить уравнение равновесия. Таким образом, появляется возможность определить внутренние силовые факторы в сечении, благодаря которым оставшаяся часть тела находится в равновесии (прием, часто применяемый в Статике).
Применяя к оставленной части тела условия равновесия, невозможно найти закон распределения внутренних сил по сечению, но можно определить статические эквиваленты этих сил (равнодействующие силовые факторы).
Так как основным расчетным объектом в сопротивлении материалов является брус, рассмотрим, какие статические эквиваленты внутренних сил проявляются в поперечном сечении бруса.
Рассечем брус (рис. 1) поперечным сечением а-а и рассмотрим равновесие его левой части.
Если внешние силы, действующие на брус, лежат в одной плоскости, то в общем случае статическим эквивалентом внутренних сил, действующих в сечении а-а, будут главный вектор Fгл, приложенный в центре тяжести сечения, и главный момент Мгл = Ми, уравновешивающие плоскую систему внешних сил, приложенных к оставленной части бруса.
Разложим главный вектор на составляющую N, направленную вдоль оси бруса, и составляющую Q, перпендикулярную этой оси и лежащую в плоскости сечения. Эти составляющие главного вектора и главный момент называютвнутренними силовыми факторами, действующими в сечении бруса. Составляющую N называют продольной силой, составляющую Q – поперечной силой, пару сил с моментом Ми – изгибающим моментом.
Для определения указанных трех внутренних силовых факторов применим известные из Статики уравнения равновесия оставленной части бруса:
Σ Z = 0; Σ Y = 0; Σ M = 0; (ось z всегда направляем по оси бруса).
Если внешние силы, действующие на брус, не лежат в одной плоскости, т. е. представляют собой пространственную систему сил, то в общем случае в поперечном сечении бруса возникают шесть внутренних силовых факторов(рис. 2), для определения которых применяют известные из Статики шесть уравнений равновесия оставленной части бруса:
Σ X = 0; Σ Y = 0; Σ Z = 0;
Σ Mx = 0; Σ My = 0; Σ Mz = 0.
Эти силовые факторы в общем случае носят следующие названия:N – продольная сила, Qx, Qy – поперечные силы, Мкр – крутящий момент, Мих и Миу – изгибающие моменты.
При разных деформациях в поперечном сечении бруса возникают различные силовые факторы.
Рассмотрим частные случаи:
1. В сечении возникает только продольная сила N. Это деформация растяжения (если N направлена от сечения) или сжатия (если Nнаправлена к сечению).
2. В сечении возникает только поперечная сила Q. Это деформация сдвига.
3. В сечении возникает только крутящий момент Мкр. Это деформация кручения.
4. В сечении возникает только изгибающий момент Ми. Это деформация чистого изгиба. Если в сечении одновременно возникает изгибающий моментМи и поперечная сила Q, то изгиб называют поперечным.
5. Если в сечении одновременно возникает несколько внутренних силовых факторов (например, изгибающий момент и продольная сила), то имеет место сочетание основных деформаций (сложное сопротивление).
11) Допущения о свойствах материалов и характере деформаций
Допущения о свойствах материалов:
- Материал однороден , т. е. его свойства не зависят от размеров выделенного из тела объема. В действительности однородных материалов в природе нет. Например, структура металлов состоит из множества хаотически расположенных микроскопически мелких кристаллов (зерен). Размеры же рассчитываемых элементов конструкций, как правило, неизмеримо превышают размеры кристаллов, поэтому допущение об однородности материала здесь полностью применимо.
- Материал представляет собой сплошную среду и непрерывно заполняет весь предоставленный ему объем. Это допущение вытекает непосредственно из первого - об однородности материала - и позволяет применять математический анализ.
- Материал изотропен , т. е. физико-механические свойства одинаковы по всем направлениям. Таким образом, выделенный из сплошной среды элемент не зависит от ориентации относительно выбранной системы координат. Металлы благодаря своей мелкозернистой структуре считаются изотропными. Но есть много неизотропных - анизотропных - материалов. К ним относятся древесина, ткани, фанера, многие пластмассы. Однако в сопротив-лении материалов рассматриваются в основном материалы изотропные.
- Материал в определенных пределах нагружения тела обладает идеальной упругостью , т. е. после снятия нагрузки тело полностью восстанавливает первоначальные формы и размеры.
Допущения о характере деформации элементов конструкций:
12)Классификация внешних сил. Реальный объект и расчетная схема
Внешними силами называют силы взаимодействия между рассматриваемым элементом конструкции и связанными с ним телами. Если же нагрузка распределена по поверхности тела или его части, то такую нагрузку называют распределенной
В расчетной схеме нагрузку, распределенную по поверхности (рис. 1.2) приводят к плоскости, совпадающей с продольной осью, в результате чего получается нагрузка, распределенная по линии. Мерой такой нагрузки является ее интенсивность q - величина нагрузки на единицу длины. Размерность - Н/м. Равнодействующая распределенной нагрузки численно равна площади ее эпюры и приложена в центре ее тяжести.
Рис. 1.2
Кроме тoro, встречаются нагрузки в виде сосредоточенного момента (пары сип). Есть несколько способов изображения моментов (рис. 1.3).
Рис. 1.3
Тогда М - это крутящий момент (рис. 1.4).
Рис. 1.4
Так изображается сипа, идущая к нам.
Так изображается сила, идущая от нас.
Реальный объект
–исследуемый элемент конструкции,взятый с учетом всехсвоих особенностей: геометрических, физических, механических и других.
Рассчитать реальный объект практически невозможно (пришлось бы учитывать влияние слишком многих взаимосвязанных характеристик объекта), поэтому необходимо перейти к некоторой расчетной схеме (модели реального объекта) на основе определенной сис-темы гипотез, идеализирующих расчетную ситуацию.
Расчетная схема –это реальный объект,у которого отброшены все детали(особенности), не связанные с расчетом, а их влияние заменено силовыми воздействиями.
Основная цель сопротивления материалов – создать практически приемле-мые, простые приемы (методики) расчета типовых, наиболее часто встре-чающихся элементов конструкций. Необходимость перехода от реального объекта к расчетной схеме (с целью упрощения расчетов) заставляет вводить схематизацию понятий.
Можно выделить следующие типы схематизации:
геометрическая схематизация ; физическая схематизация ; силовая схематизация .
Геометрическая схематизация (модель формы)
Для схематизации формы реальных объектов в сопротивлении материалов используются следующие основные типы элементов: стержень (брус, балка,
вал), пластина (плита, оболочка) и массивное тело .
Стержень –элемент конструкции,у которого два измере-ния малы по сравнению с третьим.
Задачи по расчету стержней в основном являются одномерными (линейными, т. е. решение задачи зависит от одной переменной коор-динаты).
Пластина –элемент конструкции,у которого одно измерение(толщина)мало по сравнению с двумя другими.
Пластина криволинейная до нагружения называется оболочкой.
Задачи по расчету пластин в основном являются двумерными (плоскими)
Массивное тело –элемент конструкции,у которого все размеры имеют одинпорядок.
Задачи по расчету массивных тел в основном являются трехмерными (пространст-венными).
В сопротивлении материалов рассматриваются преимущественно одномерные задачи рас-чета стержневых элементов конструкций. Решение более сложных двумерных и трехмер-ных задач расчета пластин, оболочек и массивных тел рассматривает дисциплина, назы-ваемая «Теория упругости», которая основывается на меньшем количестве исходных ги-потез.
Физическая схематизация (модель материала)
Все изучаемые тела считаются выполненными (изготовленными) из материалов, условно наделенных определенными идеализированными свойствами.
Материал элементов конструкций будем в дальнейшем считать сплошным ,
однородным , изотропным и линейно-упругим .
Сплошной материал –материал,не имеющий разрывов,пустот,трещин,пор,включений и т. д.
Считается, что материал непрерывно (сплошь) заполняет весь объем элемента конструк-ции, при этом не учитывается конкретная структура материала (зеренная, кристалличе-ская, волокнистая, слоистая и т. д.).
Однородный материал –материал,в каждой точке которого механическиесвойства одинаковы и не зависят от величины выделенного объема.
Изотропный материал –материал,свойства которого одинаковы по всем на-правлениям.
Таким образом, свойства изотропного материала не зависят от направления исследования, например, от направления приложения нагрузки при механических испытаниях.
В противном случае материал называется анизотропным (дерево, стеклопластик, слюда и др.).
Упругий материал –материал,обладающий способностью восстанавливатьпервоначальные форму и размеры тела после снятия внешней нагрузки.
Линейно-упругий материал –материал,подчиняющийсязакону Гука .
Закон Гука : «Перемещения точек упругого тела(в известных пределах на-гружения) прямо пропорциональны силам, вызывающим эти перемещения».
Силовая схематизация (модель нагружения)
Для правильной постановки задачи в сопротивлении материалов весьма важно уметь классифицировать внешние силы (нагрузки), действующие на элементы конструкций.
Внешние силы –силы взаимодействия между рассматриваемым элементомконструкции и другими телами, связанными с ним.
Введем следующую классификацию внешних сил по способу приложения:
Сосредоточенные нагрузки –силы и моменты,площадьдействия которых мала по сравнению с размерами объекта (приложены в точке).
Обозначения: F (Р ), М (T ).
Единицы измерения: [F ]=H; [M ]=Н·м в СИ или [F ]=кг; [M ]=кг·м в технической системе.
Распределенные нагрузки –силы,действующие а)на не-
которой длине, б) по некоторой площадке, в) по объему.
Обозначение q .
Единицы измерения: а) [q ]=H/м, кг/ см, кг/мм; б) [q ]=H/м 2 , кг/см 2 , кг/мм 2 ; в) [q ]=H/м 3 , кг/см 3 , кг/мм 3 и т. д.
Внешние нагрузки различают также по характеру изменения во времени: Статические нагрузки медленно и плавно возрастают от нуля до своего ко-нечного значения, а затем остаются неизменными.
Динамические нагрузки сопровождаются ускорениями как деформированно-го тела, так и взаимодействующих с ним тел.
К динамическим нагрузкам относятся, например, силы действующие на ускорено движу-щиеся тела, ударные нагрузки и т. д.
Повторно- переменные нагрузки –силы непрерывно и периодически изме-няющиеся во времени.
Теперь, введя рассмотренную схематизацию понятий, мы мо-жем переходить к работе с расчетными схемами, к их анализу. При этом отметим, что один и тот же реальный объект может иметь несколько расчетных схем, а одной и той же расчетной схеме может быть поставлено в соответствие много различных реальных объектов. В частности, при расчете мостового крана (см. рисунок) трос и опорная колонна будут рассчитываться по расчетной схеме растянутого или сжатого стержня, а каретка и направляющие – по схеме двухопорной балки и т. д. Отсюда вытекает еще одно определение сопротивления мате - риалов.
Сопротивление материалов –инженерная дисциплина,занимающаяся проч-ностным (в общем смысле) анализом наиболее типичных (часто встречаю-щихся) расчетных схем, годных для расчета любых элементов любых конструкций.
13) Внутренние усилия при растяжении и сжатии. Построение эпюр внутренних усилий. Понятие об опасном сечении.
Растяжение и сжатие
Растяжение (сжатие) - простой вид сопротивления, при котором стержень нагружен силами, параллельными продольной оси стержня и приложенными в центр тяжести его сечения.
Рассмотрим стержень, упруго растянутый центрально приложенными сосредоточенными силами P.
Прежде чем перейти к исследованию внутренних усилий и напряжений, возникающих в растянутом стержне, рассмотрим некоторые гипотезы, связанные с характером деформирования такого стержня и имеющие в сопротивлении материалов исключительно важное значение.
Принцип Сен-Венана : в сечениях, достаточно удаленных от мест приложения сил, распределение напряжений и деформаций мало зависит от способа приложения нагрузок .
Принцип Сен-Венана дает возможность вести расчет без учета местных (локальных) деформаций, возникающих вблизи точек приложения внешних сил и отличающихся от деформаций основного объема материала, что в большинстве случаев упрощает решение задачи.
Гипотеза плоских сече-ний (гипотеза Я.Бернулли ):поперечные сечения стержня плоские и перпендикулярные его оси до деформации остаются плоскими и перпендикулярными оси, и после деформации .
Мысленно рассекая стер-жень, определим внутренние силы в растянутом стержне:
а) стержень, нагруженный растя-гивающими силами P и находя-щийся в равновесии, рассекаем произвольным сечением;
б) отбрасываем одну из частей стержня, а ее действие на дру-гую часть компенсируем вну-тренними усилиями интенсив-ностью ;
в) осевое внутреннее усилие N, возникающее в сечении стержня, определим, составляя уравнения равновесия для отсеченной части:
Проецируя внешнюю силу P, действующую на отсеченную часть стержня, на другие оси (z и y), а также составляя уравнения моментов относительно координатных осей, легко убедится, что осевое усилие N является единственным внутренним усилием, возникающим в сечении стержня (остальные тождественно равны нулю).
Таким образом, при растяжении (сжатии) из шести внутренних усилий в сечении стержня возникает только одно -продольная сила N.
Нормальные напряжения , возникающие в сечении стержня, связаны с осевым усилием N следующим образом:
Или . (2.2)
Учитывая, что в соответствии с гипотезой Бернулли напряжения равномерно распределены по поперечному сечению (т.е. =const), можно записать:
Таким образом, нормальные напряжения при растяжении (сжатии) определяются как
ЭПЮРЫ ВНУТРЕННИХ УСИЛИЙ ПРИ РАСТЯЖЕНИИ-СЖАТИИ
Растяжением или сжатием называется такой простой вид сопротивления, при котором внешние силы приложены вдоль продольной оси бруса, а в поперечном сечении его возникает только нормальная сила.
Рассмотрим расчетную схему бруса постоянного поперечного сечения с заданной внешней сосредоточенной нагрузкой Р и распределенной q, (рис.1).
а) расчетная схема, б) первый участок, левая отсеченная часть, в) второй участок, левая отсеченная часть, г) второй участок, правая отсеченная часть, д) эпюра нормальных сил
Рис.1. Построение эпюры нормальных сил:
Пусть . Прежде всего определим опорную реакцию R , задавшись ее направлением вдоль оси х .
Брус имеет 2 участка 1 и 2.
В пределах первого участка мысленно рассечем брус на 2 части нормальным сечением и рассмотрим равновесие, допустим левой части, введя следующую координату х 1 , рис.1 б:
Следовательно, в пределах первого участка брус претерпевает сжатие постоянной нормальной силой.
Аналогично поступим со вторым участком. Мысленно рассечем его сечением 2-2, и рассмотрим равновесие левой части (рис.1 в).Установим предварительно границы изменения х 2 :
Подставляя граничные значения параметра х 2 , получим:
Таким образом, в пределах второго участка брус растянут и нормальная сила изменяется по линейному закону.
Аналогичный результат получается и при рассмотрении правой отсеченной части (рис.1 г):
На основе полученных данных строится эпюра нормальных сил в виде графика распределения нормальной силы по длине бруса (рис.1 д). Характерно, что скачки на эпюре обусловлены наличием в соответствующих сечениях сосредоточенных сил R и Р , что в свою очередь может служить правилом правильности выполненных построений.
Для проверки на прочность при изгибе по действующим на балку внешним нагрузкам строят эпюры изменения внутренних усилий по ее длине и определяют опасные сечения балки, для каждого из которых необходимо провести проверку прочности.
При полной проверке прочности таких сечений будет, как минимум, три (иногда они совпадают):
1. сечение, в котором изгибающий момент Мх - достигает своего максимального по модулю значения, - именно по этому сечению подбирают сечение всей балки;
2. сечение, в котором поперечная сила Qy , достигает своего максимального по модулю значения;
3. сечение, в котором и изгибающий момент Мx и поперечная сила Qy достигают по модулю достаточно больших величин.
В каждом из опасных сечений необходимо, построив эпюры нормальных и касательных напряжений, найти опасные точки сечения (проверка прочности проводится для каждой из них), которых также будет, как минимум, три:
1. точка, в которой нормальные напряжения , достигают своего максимального значения, - то есть точка на наружной поверхности балки наиболее удаленная от нейтральной оси сечения;
2. точка, в которой касательные напряжения достигают своего максимального значения, - точка, лежащая на нейтральной оси сечения;
точка, в которой и нормальные напряжения, и касательные напряжения, достигают достаточно больших величин (эта проверка имеет смысл
для сечений типа тавра или двутавра, где ширина резко изменяет свое значение).
14) Условие прочности при кручении. Понятие об опасном сечении
Условие прочности при кручении с учетом принятых обозначений формулируется следующим образом: максимальные касательные напряжения, возникающие в опасном сечении вала, не должны превышать допускаемых напряжений
и записывается в виде
где берется либо на основании опытных данных, либо (при отсутствии нужных опытных характеристик) по теориям прочности, соответствующим материалу. Например, из теорий прочности для хрупких материалов, примененных для чистого сдвига, следуют такие результаты:
Из второй теории прочности
Из теории Мора
Из теорий прочности для пластичных материалов при чистом сдвиге получим:
По третьей теории прочности
По четвертой теории прочности
Как следует из закона парности касательных напряжений, одновременно с касательными напряжениями, действующими в плоскости поперечного сечения вала, имеют место касательные напряжения в продольных плоскостях. Они равны по величине парным напряжениям, но имеют противоположный знак. Таким образом, все элементы бруса при кручении находятся в состоянии чистого сдвига. Так как чистый сдвиг является частным случаем плоского напряженного состояния, при котором , , , то при повороте граней элемента на 45 0 в новых площадках обнаруживаются только нормальные напряжения, равные по величине (рис.5.8).
Рассмотрим возможные виды разрушения валов, изготовленных из различных материалов при кручении. Валы из пластичных материалов чаще всего разрушаются по сечению, перпендикулярному к оси вала, под действием касательных напряжений, действующих в этом сечении (рис.5.9,а). Валы из хрупких материалов, разрушаются по винтовой поверхности наклоненной к оси вала под углом 45 0 , т.е. по направлению действия максимальных растягивающих напряжений (рис.5.9,б). У деревянных валов первые трещины возникают по образующим цилиндра, так как древесина плохо сопротивляется действию касательных напряжений, направленных вдоль волокон (рис.5.9,в).
Рис.5.8 Рис.5.9
Таким образом, характер разрушения зависит от способности материала вала сопротивляться воздействию нормальных и касательных напряжений. В соответствии с этим, допускаемые касательные напряжения принимаются равным - для хрупких материалов и - для пластичных материалов.
В опасном сечении вала при изгибе с кручением одновременно возникают наибольшие крутящий () и результирующий изгибающий момент.
15) Кручение. Напряжение при кручении. Эпюра касательных напряжений.
Кручением
называют деформацию, возникающую при действии на стержень пары сил, расположенной в плоскости, перпендикулярной к его оси (рис. 5.1).
Стержни круглого или кольцевого сечения, работающие на кручение, называют валами. При расчете валов обычно бывает известна мощность, передаваемая на вал, а величины внешних скручивающих моментов, подлежат определению. Внешние скручивающие моменты, как правило, передаются на вал в местах посадки на него шкивов, зубчатых колес и т.п.
Пусть вал вращается с постоянной скоростью n об/мин. и передает мощность N Нм/с. Угловая скорость вращения вала равна (рад/сек), а передаваемая мощность .
Скручивающий момент равен .
Если мощность задана в киловаттах, то величина скручивающего момента определяется по формуле
НАПРЯЖЕНИЕ ПРИ КРУЧЕНИИ.
Если к концам вала приложены равные, но противоположно направленные внешние скручивающие моменты, то во всех его поперечных сечениях существуют только касательные напряжения, т.е. напряженное состояние в точках скручиваемого стержня представляет собой чистый сдвиг. В круговом поперечном сечении вала деформации сдвига и касательные напряжения равны нулю в центре и максимальны на краю; в промежуточных точках они пропорциональны расстоянию от центра тяжести сечения. Обычная формула для максимального касательного напряжения при кручении такова: S = Tc /J , где T – скручивающий момент на одном конце, c – радиус вала и J – полярный момент сечения. Для круга J = pr 4 /2. Эта формула применима только в случае кругового поперечного сечения. Формулы для валов с поперечным сечением другой формы выводятся путем решения соответствующих задач методами математической теории упругости с привлечением в некоторых случаях методов экспериментального анализа.
Рис. 2.9. Эпюры касательных напряжений при кручении
а) упругая стадия; б) стадия пластического деформирования;
в) стадия разрушения; 1 – упругая зона; 2 – пластическая зона
Необходимо знать точку приложения и направление каждой силы. Важно уметь определить какие именно силы действуют на тело и в каком направлении. Сила обозначается как , измеряется в Ньютонах. Для того, чтобы различать силы, их обозначают следующим образом
Ниже представлены основные силы, действующие в природе. Придумывать не существующие силы при решении задач нельзя!
Сил в природе много. Здесь рассмотрены силы, которые рассматриваются в школьном курсе физики при изучении динамики. А также упомянуты другие силы, которые будут рассмотрены в других разделах.
Сила тяжести
На каждое тело, находящееся на планете, действует гравитация Земли . Сила, с которой Земля притягивает каждое тело, определяется по формуле


Точка приложения находится в центре тяжести тела. Сила тяжести всегда направлена вертикально вниз .

Сила трения
Познакомимся с силой трения. Эта сила возникает при движении тел и соприкосновении двух поверхностей. Возникает сила в результате того, что поверхности, если рассмотреть под микроскопом, не являются гладкими, как кажутся. Определяется сила трения по формуле:


Сила приложена в точке соприкосновения двух поверхностей. Направлена в сторону противоположную движению.

Сила реакции опоры
Представим очень тяжелый предмет, лежащий на столе. Стол прогибается под тяжестью предмета. Но согласно третьему закону Ньютона стол воздействует на предмет с точно такой же силой, что и предмет на стол. Сила направлена противоположно силе, с которой предмет давит на стол. То есть вверх. Эта сила называется реакцией опоры. Название силы "говорит" реагирует опора . Эта сила возникает всегда, когда есть воздействие на опору. Природа ее возникновения на молекулярном уровне. Предмет как бы деформировал привычное положение и связи молекул (внутри стола), они, в свою очередь, стремятся вернуться в свое первоначальное состояние, "сопротивляются".
Абсолютно любое тело, даже очень легкое (например,карандаш, лежащий на столе), на микроуровне деформирует опору. Поэтому возникает реакция опоры.
Специальной формулы для нахождения этой силы нет. Обозначают ее буквой , но эта сила просто отдельный вид силы упругости, поэтому она может быть обозначена и как
Сила приложена в точке соприкосновения предмета с опорой. Направлена перпендикулярно опоре.

Так как тело представляем в виде материальной точки, силу можно изображать с центра
Сила упругости
Это сила возникает в результате деформации (изменения первоначального состояния вещества). Например, когда растягиваем пружину, мы увеличиваем расстояние между молекулами материала пружины. Когда сжимаем пружину - уменьшаем. Когда перекручиваем или сдвигаем. Во всех этих примерах возникает сила, которая препятствует деформации - сила упругости.
Закон Гука


Сила упругости направлена противоположно деформации.

Так как тело представляем в виде материальной точки, силу можно изображать с центра
При последовательном соединении, например, пружин жесткость рассчитывается по формуле

При параллельном соединении жесткость

Жесткость образца. Модуль Юнга.


Модуль Юнга характеризует упругие свойства вещества. Это постоянная величина, зависящая только от материала, его физического состояния. Характеризует способность материала сопротивляться деформации растяжения или сжатия. Значение модуля Юнга табличное.
Подробнее о свойствах твердых тел .
Вес тела
Вес тела - это сила, с которой предмет воздействует на опору. Вы скажете, так это же сила тяжести! Путаница происходит в следующем: действительно часто вес тела равен силе тяжести, но это силы совершенно разные. Сила тяжести - сила, которая возникает в результате взаимодействия с Землей. Вес - результат взаимодействия с опорой. Сила тяжести приложена в центре тяжести предмета, вес же - сила, которая приложена на опору (не на предмет)!

Формулы определения веса нет. Обозначается эта силы буквой .
Сила реакции опоры или сила упругости возникает в ответ на воздействие предмета на подвес или опору, поэтому вес тела всегда численно одинаков силе упругости, но имеет противоположное направление.

Сила реакции опоры и вес - силы одной природы, согласно 3 закону Ньютона они равны и противоположно направлены. Вес - это сила, которая действует на опору, а не на тело. Сила тяжести действует на тело.
Вес тела может быть не равен силе тяжести. Может быть как больше, так и меньше, а может быть и такое, что вес равен нулю. Это состояние называется невесомостью . Невесомость - состояние, когда предмет не взаимодействует с опорой, например, состояние полета: сила тяжести есть, а вес равен нулю!

Определить направление ускорения возможно, если определить, куда направлена равнодействующая сила
Обратите внимание, вес - сила, измеряется в Ньютонах. Как верно ответить на вопрос: "Сколько ты весишь"? Мы отвечаем 50 кг, называя не вес, а свою массу! В этом примере, наш вес равен силе тяжести, то есть примерно 500Н!
Перегрузка - отношение веса к силе тяжести
Сила Архимеда
Сила возникает в результате взаимодействия тела с жидкость (газом), при его погружении в жидкость (или газ). Эта сила выталкивает тело из воды (газа). Поэтому направлена вертикально вверх (выталкивает). Определяется по формуле:


В воздухе силой Архимеда пренебрегаем.
Если сила Архимеда равна силе тяжести, тело плавает. Если сила Архимеда больше, то оно поднимается на поверхность жидкости, если меньше - тонет.

Электрические силы
Существуют силы электрического происхождения. Возникают при наличии электрического заряда. Эти силы, такие как сила Кулона , сила Ампера , сила Лоренца , подробно рассмотрены в разделе Электричество .
Схематичное обозначение действующих на тело сил
Часто тело моделируют материальной точкой . Поэтому на схемах различные точки приложения переносят в одну точку - в центр, а тело изображают схематично кругом или прямоугольником.
Для того, чтобы верно обозначить силы, необходимо перечислить все тела, с которыми исследуемое тело взаимодействует. Определить, что происходит в результате взаимодействия с каждым: трение, деформация, притяжение или может быть отталкивание. Определить вид силы, верно обозначить направление. Внимание! Количество сил будет совпадать с числом тел, с которыми происходит взаимодействие.
Главное запомнить
1) Силы и их природа;
2) Направление сил;
3) Уметь обозначить действующие силы
Различают внешнее (сухое) и внутреннее (вязкое) трение. Внешнее трение возникает между соприкасающимися твердыми поверхностями, внутреннее - между слоями жидкости или газа при их относительном движении. Существует три вида внешнего трения: трение покоя, трение скольжения и трение качения.
Трение качения определяется по формуле


Сила сопротивления возникает при движении тела в жидкости или в газе. Величина силы сопротивления зависит от размеров и формы тела, скорости его движения и свойств жидкости или газа. При небольших скоростях движения сила сопротивления пропорциональна скорости тела


При больших скоростях пропорциональна квадрату скорости


Рассмотрим взаимное притяжение предмета и Земли. Между ними, согласно закону гравитации возникает сила 
А сейчас сравним закон гравитации и силу тяжести 
Величина ускорения свободного падения зависит от массы Земли и ее радиуса! Таким образом, можно высчитать, с каким ускорением будут падать предметы на Луне или на любой другой планете, используя массу и радиус той планеты.
Расстояние от центра Земли до полюсов меньше, чем до экватора. Поэтому и ускорение свободного падения на экваторе немного меньше, чем на полюсах. Вместе с тем, следует отметить, что основной причиной зависимости ускорения свободного падения от широты местности, является факт вращения Земли вокруг своей оси.

При удалении от поверхности Земли сила земного тяготения и ускорения свободного падения изменяются обратно пропорционально квадрату расстояния до центра Земли.

Изучение данных вопросов необходимо для динамики колебательного движения механических систем, теории удара, для решения задач в дисциплинах «Сопротивление материалов» и «Детали машин».
Механической системой материальных точек или тел называется такая их совокупность, в которой положение или движение каждой точки (или тела) зависит от положения и движения всех остальных.
Материальное абсолютно твердое тело мы также будем рассматривать как систему материальных точек, образующих это тело и связанных между собой так, что расстояния между ними не изменяются, все время остаются постоянными.
Классическим примером механической системы является солнечная система, в которой все тела связаны силами взаимного притяжения. Другим примером механической системы может служить любая машина или механизм, в которых все тела связаны шарнирами, стержнями, тросами, ремнями и т.п. (т.е. различными геометрическими связями). В этом случае на тела системы действуют силы взаимного давления или натяжения, передаваемые через связи.
Совокупность тел, между которыми нет никаких сил взаимодействия (например, группа летящих в воздухе самолетов), механическую систему не образует.
В соответствии со сказанным, силы, действующие на точки или тела системы, можно разделить на внешние и внутренние.
Внешними называются силы, действующие на точки системы со стороны точек или тел, не входящих в состав данной системы.
Внутренними называются силы, действующие на точки системы со стороны других точек или тел этой же системы. Будем обозначать внешние силы символом - , а внутренние - .
Как внешние, так и внутренние силы могут быть в свою очередь или активными , или реакциями связей.
Реакции связей или просто – реакции , это силы которые ограничивают движение точек системы (их координаты, скорость и др.). В статике это были силы заменяющие связи. В динамике для них вводится более общее определение.
Активными или задаваемыми силами называются все остальные силы, все кроме реакций.
Необходимость этой классификации сил выяснится в следующих главах.
Разделение сил на внешние и внутренние является условным и зависит от того, движение какой системы тел мы рассматриваем. Например, если рассматривать движение всей солнечной системы в целом, то сила притяжения Земли к Солнцу будет внутренней; при изучении же движения Земли по её орбите вокруг Солнца та же сила будет рассматриваться как внешняя.
Внутренние силы обладают следующими свойствами:
1. Геометрическая сумма (главный вектор) всех внутренних сил системы равняется нулю. В самом деле, по третьему закону динамики любые две точки системы (рис.31) действуют друг на друга с равными по модулю и противоположно направленными силами и , сумма которых равна нулю. Так как аналогичный результат имеет место для любой пары точек системы, то
Внешние силы - это такие силы, которые действуют только на поверхность предмета, но не проникают внутрь его. К этим силам относятся все силы, развиваемые материальным объектом.
Внутренние силы - это такие силы, которые действуют сразу на все атомы передвигаемого предмета независимо от того, где они находятся: на поверхности или в середине предмета. К этим силам относятся силы инерции и силы поля: гравитационного, электрического, магнитного. И происходит это потому, что поле и носитель инерции физвакуум свободно проникают внутрь любого тела.
В механике внешними силами по отношению к данной системе материальных точек (т. е. такой совокупности материальных точек, в которой движение каждой точки зависит от положений или движений всех остальных точек) называются те силы, к-рые представляют собою действие на эту систему других тел (других систем материальных точек), не включенных нами в состав данной системы.
Внутренними силами являются силы взаимодействия между отдельными материальными точками данной системы. Подразделение сил на внешние и внутренние является совершенно условным: при изменении заданного состава системы некоторые силы, ранее бывшие внешними, могут стать внутренними, и обратно. Так, например, при рассмотрении
PRIMER движения системы, состоящей из земли и ее спутника луны, силы взаимодействия между этими телами будут внутренними силами для этой системы, а силы притяжения солнца, остальных планет, их спутников и всех звезд будут внешними силами по отношению к указанной системе. Но если изменить состав системы и рассматривать движение солнца и всех планет как движениеодной общей системы, то внешн. силами будут только силы притяжений, оказываемых

Если нагруженное тело находится в равновесии, то внутренние силы равны по значению внешним силам и противоположны им по направлению. Очевидно, что они препятствуют развитию деформации.Работа внутренних сил (U), с учетом их направления по отношению к деформации, всегда является отрицательной.
Работа внешних сил равна взятой с обратным знаком работе внутренних сил :
Пусть элемент стержня длиной испытывает растяжение (рис. 15.3, а).
Действие
отброшенных частей стержня на
рассматриваемый элемент заменим
продольными силами N. Эти усилия показаны
на рисунке штриховыми линиями. По
отношению к элементу они являются как
бы внешними. Вызываемое ими удлинение
элемента равно: ![]() .
.
 Действие
рассматриваемого элемента на отброшенные
части показано на рисунке сплошными
линиями. Элементарная работа внутренних
продольных сил, постепенно увеличивающихся,
и противодействующих развитию удлинения,
согласно теореме Клапейрона, выразится
формулой:
Действие
рассматриваемого элемента на отброшенные
части показано на рисунке сплошными
линиями. Элементарная работа внутренних
продольных сил, постепенно увеличивающихся,
и противодействующих развитию удлинения,
согласно теореме Клапейрона, выразится
формулой:  .
.
ЭЛЕМЕНТАРНАЯ РАБОТА ВНУТРЕННИХ ПОПЕРЕЧНЫХ СИЛ () ПРИ ЧИСТОМ СДВИГЕ (РИС. 15.3, Б)
При чистом сдвиге касательные напряжения равномерно распределены по всему сечению и определяются по формуле: .
Абсолютный сдвиг правого сечения элемента по отношению к левому сечению, с учетом закона Гука, равен: ,
тогда  .
.
При поперечном
изгибе касательные напряжения распределены
по сечению неравномерно. В этом случае
выражение для элементарной работы
внутренних перерезывающих сил может
быть представлено в виде:  ,
где k – коэффициент, зависящий от формы
поперечного сечения стержня. Например,
для прямоугольного поперечного сечения .
,
где k – коэффициент, зависящий от формы
поперечного сечения стержня. Например,
для прямоугольного поперечного сечения .
ЭЛЕМЕНТАРНАЯ РАБОТА ВНУТРЕННИХ УСИЛИЙ ПРИ КРУЧЕНИИ
Поворот
правого сечения элемента по отношению
к левому сечению, происходящий под
действием внешних по отношению к нему
крутящих моментов (),
показанных (см. рис. 15.3, в) штриховыми
линиями, равен: ![]() .
.
Тогда работа
внутренних крутящих моментов (они на
рисунке не показаны) на этом угле поворота
определяется по формуле:  .
.
Пусть теперь элемент стержня испытывает изгиб. И пусть его правое поперечное сечение повернется на угол поворота по отношению к левому сечению (см. рис. 15.3, г).
Тогда внутренние изгибающие моменты, показанные (см. рис. 15.3, г) сплошными линиями, совершат на этом угле поворота работу:
 .
.
При одновременном растяжении, кручении и прямом поперечном изгибе стержня (с учетом того, что работа каждого из внутренних усилий на перемещениях, вызываемых остальными усилиями, равна нулю) получим следующее выражение для элементарной работы внутренних сил упругости:
Интегрируя выражение по всей длине стержня, окончательно получим формулу работы внутренних сил .
Силы, действующие на любую точку механической системы, делятся на внутренние и внешние.
Fi – внутренняя сила
Fe – внешняя сила
Внутренними называются силы, с которыми точки, входящие в систему, действуют друг на друга.
Внешними называются силы, которые прикладываются к точкам извне, то есть от других точек или тел, не входящих в систему. Разделение сил на внутренние и внешние условное.
mg – внешняя сила
Fтр – внутренняя сила
Механическая система. Силы внешние и внутренние.
Механической системой материальных точек или тел называется такая их совокупность, в которой положение или движение каждой точки (или тела) зависит от положения и движения всех остальных.
Материальное абсолютно твердое тело мы также будем рассматривать как систему материальных точек, образующих это тело и связанных между собой так, что расстояния между ними не изменяются, все время остаются постоянными.
Классическим примером механической системы является солнечная система, в которой все тела связаны силами взаимного притяжения. Другим примером механической системы может служить любая машина или механизм, в которых все тела связаны шарнирами, стержнями, тросами, ремнями и т.п. (т.е. различными геометрическими связями). В этом случае на тела системы действуют силы взаимного давления или натяжения, передаваемые через связи.
Совокупность тел, между которыми нет никаких сил взаимодействия (например, группа летящих в воздухе самолетов), механическую систему не образует.
В соответствии со сказанным, силы, действующие на точки или тела системы, можно разделить на внешние и внутренние.
Внешними называются силы, действующие на точки системы со стороны точек или тел, не входящих в состав данной системы.
Внутренними называются силы, действующие на точки системы со стороны других точек или тел этой же системы. Будем обозначать внешние силы символом - , а внутренние - .
Как внешние, так и внутренние силы могут быть в свою очередь или активными, или реакциями связей.
Реакции связей или просто – реакции, это силы которые ограничивают движение точек системы (их координаты, скорость и др.). В статике это были силы заменяющие связи. В динамике для них вводится более общее определение.
Активными или задаваемыми силами называются все остальные силы, все кроме реакций.
Необходимость этой классификации сил выяснится в следующих главах.
Разделение сил на внешние и внутренние является условным и зависит от того, движение какой системы тел мы рассматриваем. Например, если рассматривать движение всей солнечной системы в целом, то сила притяжения Земли к Солнцу будет внутренней; при изучении же движения Земли по её орбите вокруг Солнца та же сила будет рассматриваться как внешняя.
Внутренние силы обладают следующими свойствами:
1. Геометрическая сумма (главный вектор) всех внутренних силF12 и F21 системы равняется нулю. В самом деле, по третьему закону динамики любые две точки системы (рис.31) действуют друг на друга с равными по модулю и противоположно направленными силами и, сумма которых равна нулю. Так как аналогичный результат имеет место для любой пары точек системы, то
2. Сумма моментов (главный момент) всех внутренних сил системы относительно любого центра или оси равняется нулю. Действительно, если взять произвольный центр О, то из рис.18 видно, что . Аналогичный результат получится при вычислении моментов относительно оси. Следовательно, и для всей системы будет:
Из доказанных свойств не следует однако, что внутренние силы взаимно уравновешиваются и не влияют на движение системы, так как эти силы приложены к разным материальным точкам или телам и могут вызывать взаимные перемещения этих точек или тел. Уравновешенными внутренние силы будут тогда, когда рассматриваемая система представляет собою абсолютно твердое тело.
30Теорема о движении центра масс.
Масса системы равняется алгебраической сумме масс всех точек или тел системыВ однородном поле тяжести, для которого, вес любой частицы тела пропорционален ее массе. Поэтому распределение масс в теле можно определить по положению его центра тяжести – геометрической точки С, координаты которой называют центром масс или центром инерции механической системы
Теорема о движении центра масс механической системы : центр масс механической системы движется как материальная точка, масса которой равняется массе системы, и к которой приложены все внешние силы, действующие на систему
Выводы:
Механическую систему или твердое тело можно рассматривать как материальную точку в зависимости от характера ее движения, а не от ее размеров.
Внутренние силы не учитываются теоремой о движении центра масс.
Теорема о движении центра масс не характеризует вращательное движение механической системы, а только поступательное
Закон о сохранении движения центра масс системы:
1. Если сумма внешних сил (главный вектор) постоянно равен нулю, то центр масс механической системы находится в покое или движется равномерно и прямолинейно.
2. Если сумма проекций всех внешних сил на какую-нибудь ось равняется нулю, то проекция скорости центра масс системы на эту же ось величина постоянная.
Уравнение и выражает теорему о движении центра масс системы : произведение массы системы на ускорение ее центра масс равно геометрической сумме всех действующих на систему внешних сил. Сравнивая с уравнением движения материальной точки, получаем другое выражение теоремы: центр масс системы движется как материальная точка, масса которой равна массе всей системы и к которой приложены все внешние силы, действующие на систему.
Если выражение (2) поместить в (3) , с учётом того что, получим:
(4’) – выражает теорему о движении центра масс системы: центр масс системы движется как материальная точка, на которую действуют все силы системы.
Выводы:
1. Внутренние силы не оказывают влияния на движение центра масс системы.
2. Если , движение центра масс системы происходит с постоянной скоростью.
3. , то движение центра масс системы в проекции на ось происходит с постоянной скоростью.
Эти уравнения представляют собою дифференциальные уравнения движения центра масс в проекциях на оси декартовой системы координат.
Значение доказанной теоремы состоит в следующем.
1) Теорема дает обоснование методам динамики точки. Из уравнений видно, что решения, которые мы получаем, рассматривая данное тело как материальную точку, определяют закон движения центра масс этого тела, т.е. имеют вполне конкретный смысл.
В частности, если тело движется поступательно, то его движение полностью определяется движением центра масс. Таким образом, поступательно движущееся тело можно всегда рассматривать как материальную точку с массой, равной массе тела. В остальных случаях тело можно рассматривать как материальную точку лишь тогда, когда практически для определения положения тела достаточно знать положение его центра масс.
2) Теорема позволяет при определении закона движения центра масс любой системы исключать из рассмотрения все наперед неизвестные внутренние силы. В этом состоит ее практическая ценность.
Так движение автомобиля по горизонтальной плоскости может происходить только под действием внешних сил, сил трения, действующих на колеса со стороны дороги. И торможение автомобиля тоже возможно только этими силами, а не трением между тормозными колодками и тормозным барабаном. Если дорога гладкая, то как бы не затормаживали колеса, они будут скользить и не остановят автомобиль.
Или после взрыва летящего снаряда (под действием внутренних сил) части, осколки его, разлетятся так, что центр масс их будет двигаться по прежней траектории.
Теоремой о движении центра масс механической системы следует пользоваться для решения задач механики, в которых требуется:
По силам, приложенным к механической системе (чаще всего к твердому телу), определить закон движения центра масс;
По заданному закону движения тел, входящих в механическую систему, найти реакции внешних связей;
По заданному взаимному движению тел, входящих в механическую систему, определить закон движения этих тел относительно некоторой неподвижной системы отсчета.
С помощью этой теоремы можно составить одно из уравнений движения механической системы с несколькими степенями свободы.
При решении задач часто используются следствия из теоремы о движении центра масс механической системы.
Следствие 1. Если главный вектор внешних сил, приложенных к механической системе, равен нулю, то центр масс системы находится в покое или движется равномерно и прямолинейно. Так как ускорение центра масс равно нулю, .
Следствие 2. Если проекция главного вектора внешних сил на какую-нибудь ось равна нулю, то центр масс системы или не изменяет своего положения относительно данной оси, или движется относительно нее равномерно.
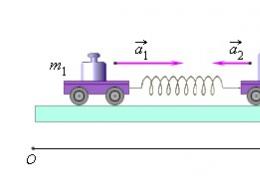
Например, если на тело начнут действовать две силы, образующие пару сил (рис.38), то центр масс С его будет двигаться по прежней траектории. А само тело будет вращаться вокруг центра масс. И неважно, где приложена пара сил.